Ультразвуковой датчик измерения расстояния HC-SR04. Подключаем ультразвуковой дальномер HC-SR04 к Arduino Датчик расстояния hc sr04
Новые статьи
● Проект 23: Ультразвуковой датчик расстояния HC-SR04. Принцип работы, подключение, пример
В этом эксперименте мы рассмотрим ультразвуковой датчик для измерения расстояния и создадим проект вывода показаний датчика на экран ЖКИ WH1602.
Необходимые компоненты:
Ультразвуковой дальномер HC-SR04 (рис. 23.1) - это помещенные на одну плату приемник и передатчик ультразвукового сигнала. Излучатель генерирует сигнал, который, отразившись от препятствия, попадает на приемник. Измерив время, за которое сигнал проходит до объекта и обратно, можно оценить расстояние. Кроме самих приемника и передатчика, на плате находится еще и необходимая обвязка, чтобы сделать работу с этим датчиком простой и удобной.
Характеристики ультразвукового дальномера HC-SR04:
Измеряемый диапазон - от 2 до 500 см;
. точность - 0,3 см;
. угол обзора - < 15°;
. напряжение питания - 5 В.
Датчик имеет 4 вывода стандарта 2,54 мм:
VCC - питание +5 В;
. Trig (T) - вывод входного сигнала;
. Echo (R) - вывод выходного сигнала;
. GND - земля.
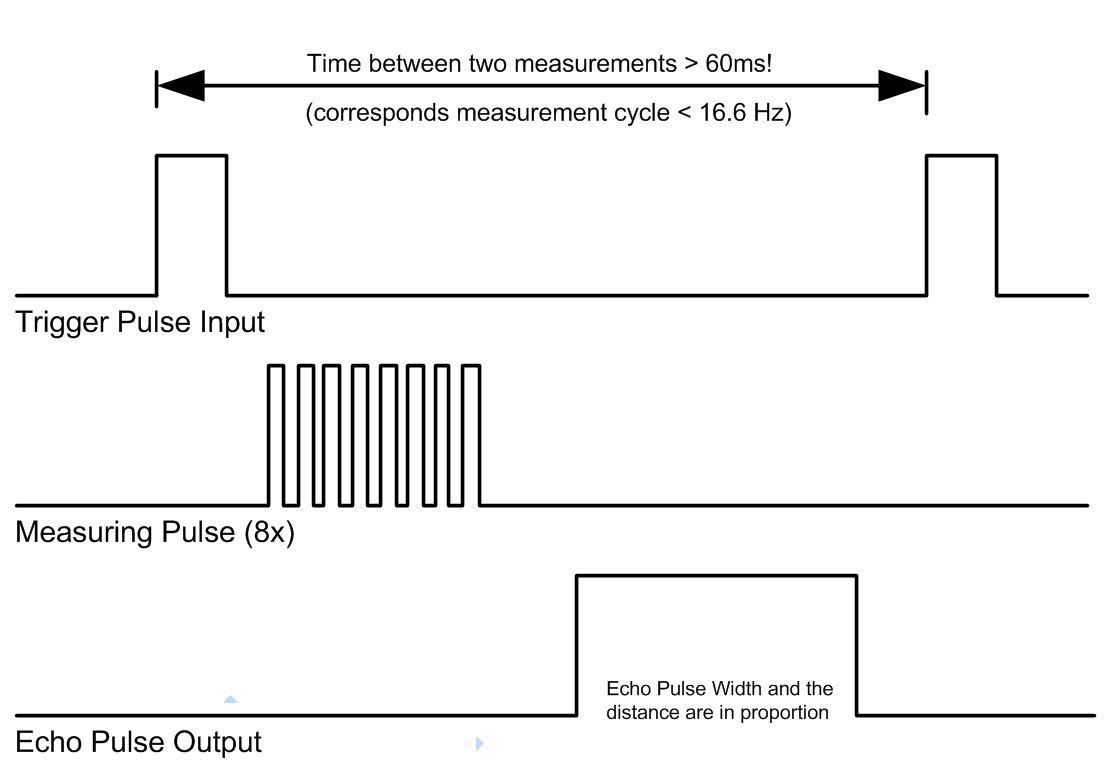
Последовательность действий для получения данных такова:
Подаем импульс продолжительностью 10 мкс на вывод Trig;
. внутри дальномера входной импульс преобразуется в 8 импульсов частотой 40 кГц и посылается вперед через излучатель T;
. дойдя до препятствия, посланные импульсы отражаются и принимаются приемником R, в результате получаем выходной сигнал на выводе Echo;
. непосредственно на стороне контроллера переводим полученный сигнал в расстояние по формуле:
Ширина импульса (мкс) / 58 = дистанция (см);
-- ширина импульса (мкс) / 148 = дистанция (дюйм).
В нашем эксперименте мы создадим звуковую сигнализацию, которая будет включаться при приближении к плате Arduino на расстояние меньше 1 м. Датчик размещен на кронштейне вращающейся сервы и контролирует пространство с углом обзора 180°. Если датчик обнаруживает объект в радиусе 1 м, подается звуковой сигнал на пьзоизлучатель, вращение сервы прекращается. Схема соединения элементов представлена на рис. 23.2.

Рис. 23.2. Схема соединения элементов для звуковой сигнализации
При написании скетча будем использовать библиотеку Servo для работы с сервоприводом и библиотеку Ultrasonic.
Для работы Arduino с датчиком HC-SR04 имеется готовая библиотека - Ultrasonic.
Конструктор Ultrasonic принимает два параметра: номера пинов, к которым подключены выводы Trig и Echo, соответственно:
Ultrasonic ultrasonic(12,13);
Содержимое скетча показано в листинге 23.1.
#include
Порядок подключения:
1. Закрепляем датчик расстояния HC-SR04 на сервоприводе.
2. Подключаем датчик HC-SR04, пьезозуммер и сервопривод к плате Arduino по схеме на рис. 23.2.
3. Загружаем в плату Arduino скетч из листинга 23.1.
4. Наблюдаем за циклическим перемещением сервопривода, при попадании объекта в поле зрения датчика HC-SR04 пьезозуммер издает сигнал, сервопривод останавливается, при исчезновении объекта из поля зрения датчика сервопривод возобновляет движение.
Листинги программ
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR04. В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью.
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10 -6 с.

Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
Где купить модуль SR04 для Ардуино
Датчик расстояния – достаточно распространенный компонент и его без труда можно найти в интернет-магазинах. Самые дешевые варианты (от 40-60 рублей за штуку), традиционно на всем известном сайте.
  Модуль датчика расстояния HC-SR04 для Ардуино Модуль датчика расстояния HC-SR04 для Ардуино
|   Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика
|
 Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики) Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики)
|   Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика
|
Схема взаимодействия с Arduino
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.
Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.

Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:

Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Также для повышения точности надо правильно направить датчик: сделать так, чтобы предмет был в рамках конуса диаграммы направленности. Проще говоря, “глазки” HC-SR04 должны смотреть прямо на предмет.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, ) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Примеры использования датчика расстояния
Давайте рассмотрим пример простого проекта с платой Arduino Uno и датчиком расстояния HC SR04. В скетче мы будем получать значение расстояния до предметов и выводить их в монитор порта в среде Arduino IDE. Вы сможете легко изменить скетч и схему подключения, чтобы датчик сигнализировал о приближении или отдалении предмета.
Подключение датчика к ардуино
При написании скетча использовалась следующий вариант распиновки подключения датчика:
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Пример скетча
Начнем работу с датчиком сразу с относительного сложного варианта – без использования внешних библиотек.
В данном скетче мы выполняем такую последовательность действий:
- Коротким импульсом (2-5 микросекунды) переводим датчик расстояния в режим эхолокации, при котором в окружающее пространство высылаются ультразвуковые волны с частотой 40 КГц.
- Ждем, пока датчик проанализирует отраженные сигналы и по задержке определит расстояние.
- Получаем значение расстояния. Для этого ждем, пока HC SR04 выдаст на входе ECHO импульс, пропорциональный расстоянию. Мы определяем длительность импульса с помощью функции pulseIn, которая вернет нам время, прошедшее до изменения уровня сигнала (в нашем случае, до появления обратного фронта импульса).
- Получив время, мы переводим его в расстояние в сантиметрах путем деления значения на константу (для датчика SR04 это 29.1 для сигнала «туда», столько же для сигнала «обратно», что в сумме даст 58.2).
Если датчик расстояния не выполняет считывание сигнала, то преобразование выходного сигнала никогда не примет значения короткого импульса – LOW. Так как у некоторых датчиков время задержки варьируется в зависимости от производителя, рекомендуется при использовании указанных скетчей выставлять его значение вручную (мы это делаем в начале цикла).
Если расстояние составляет более 3 метров, при котором HC SR04 начинает плохо работать, время задержки лучше выставлять более 20 мс, т.е. 25 или 30 мс.
#define PIN_TRIG 12 #define PIN_ECHO 11 long duration, cm; void setup() { // Инициализируем взаимодействие по последовательному порту Serial.begin (9600); //Определяем вводы и выводы pinMode(PIN_TRIG, OUTPUT); pinMode(PIN_ECHO, INPUT); } void loop() { // Сначала генерируем короткий импульс длительностью 2-5 микросекунд. digitalWrite(PIN_TRIG, LOW); delayMicroseconds(5); digitalWrite(PIN_TRIG, HIGH); // Выставив высокий уровень сигнала, ждем около 10 микросекунд. В этот момент датчик будет посылать сигналы с частотой 40 КГц. delayMicroseconds(10); digitalWrite(PIN_TRIG, LOW); // Время задержки акустического сигнала на эхолокаторе. duration = pulseIn(PIN_ECHO, HIGH); // Теперь осталось преобразовать время в расстояние cm = (duration / 2) / 29.1; Serial.print("Расстояние до объекта: "); Serial.print(cm); Serial.println(" см."); // Задержка между измерениями для корректной работы скеча delay(250); }
Скетч с использованием библиотеки NewPing
Теперь давайте рассмотрим вариант скетча с использованием библиотеки NewPing. Код существенно упростится, т.к. все описанные ранее действия спрятаны внутри библиотеки. Все, что нам нужно сделать – создать объект класса NewPing, указав пины, с помощью которых мы подключаем датчик расстояния и использовать методы объекта. В нашем примере для получения расстояния в сантиметрах нужно использовать ping_cm().
#include
Пример подключения ультразвукового дальномера HC SR04 с одним пином
Подключение HC-SR04 к Arduino может быть выполнено посредством использования одного пина. Такой вариант пригодится, если вы работаете с большим проектом и вам не хватает свободных пинов. Для подключения вам нужно просто установить между контактами TRIGи ECHO резистор номиналом 2.2K и подключить к ардуино контакт TRIG.
#include
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
В данное статье рассмотрим принцип работы ультразвукового дальномера HC-SR04.
Принцип работы ультразвукового дальномера основан на испускании ультразвука и его отражения от впереди находящихся предметов. Исходя из времени возвращения звука, по простой формуле, можно рассчитать расстояние до объекта. Дальномер HC-SR04 является самым дешевым дальномером для хоббийного использования. При малой цене обладает хорошими характеристиками, способен измерять расстояние в диапазоне от 2 до 450см.

Используемые компоненты (купить в Китае):
Принцип работы датчика можно условно разделить на 4 этапа:
1. Подаем импульс продолжительностью 10 мкс, на вывод Trig.
2. Внутри дальномера входной импульс преобразуется в 8 импульсов частотой 40 КГц и посылается вперед через "T глазик"
3. Дойдя до препятствия, посланные импульсы отражаются и принимаются "R глазиком". Получаем выходной сигнал на выводе Echo.
4. Непосредственно на стороне контроллера переводим полученный сигнал в расстояние по формуле:
ширина импульса (мкс) / 58= дистанция (см)
ширина импульса (мкс) / 148= дистанция (дюйм)

Подключение к Arduino
Модуль оборудован четырех-пиновым разъемом стандарта 2.54мм
VCC : "+" питания
TRIG (T) : вывод входного сигнала
ECHO (R) : вывод выходного сигнала (Длина сигнала зависит от расстояния объекта до датчика)
GND : "-" питания
Подключив датчик к Arduino остается только залить скетч для работы. В приведенном ниже скетче информация о расстоянии будет отсылаться в порт компьютера, а также при дистанции менее 30 сантиметров зажигать светодиод подключенный к 13 пину.
пример программного кода:
#define Trig 9 #define Echo 8 #define ledPin 13 void setup //инициируем как выход pinMode (Echo, INPUT ); //инициируем как вход pinMode (ledPin, OUTPUT ); Serial .begin (9600); /* задаем скорость общения. В нашем случае с компьютером */ } unsigned int impulseTime=0; unsigned int distance_sm=0; void loop () { digitalWrite (Trig, HIGH ); /* Подаем импульс на вход trig дальномера */ delayMicroseconds (10); // равный 10 микросекундам digitalWrite (Trig, LOW ); // Отключаем impulseTime=pulseIn (Echo, HIGH ); // Замеряем длину импульса distance_sm=impulseTime/58; Serial .println (distance_sm); // Выводим на порт if (distance_sm<30) // Если расстояние менее 30 сантиметром { digitalWrite (ledPin, HIGH ); // Светодиод горит } else { digitalWrite (ledPin, LOW ); // иначе не горит } delay (100); /* ждем 0.1 секунды, Следующий импульс может быть излучён, только после исчезновения эха от предыдущего. Это время называется периодом цикла (cycle period). Рекомендованный период между импульсами должен быть не менее 50 мс. */ }Дополнительный пример работы:
Взаимодействие дальномера и сервопривода. Дистанция, измеряемая дальномером преобразуется в угол поворота сервопривода
Пример программного кода
//Тестировалось на Arduino IDE 1.0.1
#include
Входное напряжение 5 В постоянного тока, подаётся на выводы Vcc и GND датчика.
Подробнее о датчике:
Если подать положительный импульс на вход датчика TRIG длительностью 10 мкс, то датчик отправит звуковую волну (8 импульсов на частоте 40 кГц - ультразвук) и установит уровень логической «1» на выходе ECHO. Звуковая волна отразится от препятствия и вернётся на приёмник датчика, после чего он сбросит уровень на выходе ECHO в логический «0» (то же самое датчик сделает, если звуковая волна не вернётся в течении 38 мс.) В результате время наличия логической «1» на выходе ECHO равно времени прохождения ультразвуковой волны от датчика до препятствия и обратно. Зная скорость распространения звуковой волны в воздухе и время наличия логической «1» на выводе ECHO, можно рассчитать расстояние до препятствия.

Расстояние вычисляется умножением скорости на время (в данном случае скорости распространения звуковой волны V , на время ожидания эха Echo ). Но так звуковая волна проходит расстояние от датчика до объекта и обратно, а нам нужно только до объекта, то результат делим на 2:
L = V * Echo / 2
- L – расстояние (м);
- V – скорость звука в воздухе (м/с);
- Echo – время ожидания эха (с).
Скорость звука в воздухе , в отличии от скорости света, величина не постоянная и сильно зависит от температуры:
V 2 = γ R T / M
- V – скорость звука в воздухе (м/с)
- γ – показатель адиабаты воздуха (ед.) = 7/5
- R – универсальная газовая постоянная (Дж/моль*K) = 8,3144598(48)
- T ° К) = t°C + 273,15
- M – молекулярная масса воздуха (г/моль) = 28,98
Подставив в формулу известные значения γ , R , M , получим:
V ≈ 20,042 √T
- T – абсолютная температура воздуха (° К) = t°C + 273,15
Осталось объединить формулы вычисления V и L , и перевести L из м в см, Echo из с в мкс, T из °К в °C, получим:
L ≈ Echo √(t+273,15) / 1000
- L – расстояние (см)
- Echo – время ожидания эха (мкс)
- t – температура воздуха (°C)
iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков. Они сами рассчитывают все значения и возвращают только расстояние в см. Температура по умолчанию установлена в 23°C, но её можно указывать. Работа с библиотеками и их функции описаны ниже.
Для работы с датчиком, нами разработаны две библиотеки iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков.
- Преимуществом библиотеки iarduino_HC_SR04 является то, что датчики можно подключать к любым выводам Arduino , а недостаток заключается в том, что библиотека ждёт ответа от датчика, который может длиться до 38 мс.
- Преимуществом библиотеки iarduino_HC_SR04_int является то, что она не ждёт ответа от датчиков (не приостанавливает выполнение скетча), но выводы ECHO датчиков нужно подключать только к тем выводам Arduino , которые используют внешние прерывания.
Подробнее про установку библиотеки читайте в нашей .
Примеры:
Определение расстояния с использованием библиотеки iarduino_HC_SR04:
#includeОпределение расстояния с использованием библиотеки iarduino_HC_SR04_int:
#include Результат работы обоих примеров:

Из примера видно, что если во время измерений не учитывать температуру воздуха, то можно получить результаты с высокой погрешностью.
Ардуино – уникальная система, представляющая собой пластилин в руках инженера, из которого он может слепить, что пожелает. Возможно это благодаря большому разнообразию датчиков и модулей разных направленностей. От простых чипов, измеряющих силу тока, до вещей вроде Arduino hc hc sr04.
Это специальный датчик, позволяющий, при помощи ультразвуковых волн, измерить расстояние до объекта, на который его направили. Несложно догадаться, что проще всего его применить для создания простого дальномера. Рассмотрим Arduino hc sr04 и какие нюансы в работе с ним стоит учитывать, прежде чем начать собирать проект.
1. Основы сборки дальномера на Ардуино с помощью датчика HC SR04
Если вы собираетесь собрать дальномер на Ардуино, то без HC SR04 просто не обойтись. Ведь именно этот модуль чаще всего применяют в подобных системах из-за его высокой востребованности, по причине простоты работы, доступности и низкой стоимости. При этом точность показаний остаётся на высоте, что очень важно в подобных системах. Из данного чипа можно собрать не только дальномер на Ардуино, но и полноценного робота, который будет чувствовать расстояние до объекта и обходить любое препятствие.

Однако сегодня мы рассмотрим именно вариант с дальномером на Аrduino, так как он идеально подойдёт для новичков в сфере, которые ещё не слишком хорошо разбираются в основах. Если же вы захотите затем модифицировать своё изобретение, то можно научить его моделировать полноценную трехмерную карту помещения, что будет удобно для тех, кто занимается дизайном и конструированием мебели или зданий. Но сначала стоит рассмотреть, как вообще работает данный прибор и какие основы сборки стоит усвоить, прежде чем создать лазерный дальномер на Ардуино своими руками.
Наш дальномер на Arduino будет основан на сонаре, применяемом в природе дельфинами, для измерения расстояния до объектов и спокойного обхождения препятствий. Делается это с помощью физических свойств ультразвуковых волн, которые способны отражаться, сталкиваясь с твердыми объектами, и возвращаться обратно к датчикам.

Далее в ход вступает программный код, который высчитывает, сколько времени прошло между посланием и возвратом волны, делит его на два и с помощью формул и скорости звука высчитывает усреднённое расстояние до объекта.
Почему усреднённое?
Дело в том, что любой ультразвуковой датчик все равно будет ошибаться на десятые доли метра, связано это с тем, что различные материалы, окружение и прочие переменные могут повлиять на скорость движения и отражения от поверхности звука. А в данном проекте мы берём идеальную систему, которая в реальном мире работать не может.

Можно постараться учесть все эти факторы, но каждую переменную вы все равно не запрограммируете, поэтому наша задача – получить данные, максимально приближённые к показаниям профессиональных приборов, ведь дальномер Ардуино всё ещё далёк от них по точности.
Есть и ещё один нюанс, который вам стоит заранее учесть, собирая ультразвуковой дальномер Arduino – не все поверхности подходят для измерения. Дело в том, что некоторые материалы способны поглощать звук или слишком сильно искажать его движение, подобно тому, как черная рубашка поглощает электромагнитную световую волну.
Соответственно, лучше всего применять прибор к гладким и плоским поверхностям, которые не будут нарушать движения УВ, что также ограничивает его функционал. Но благодаря низкому ценнику и удобству работы датчик всё ещё остается достаточно популярным.
2. Что будет в уроке?

Мы соберем дальномер, который будет работать по следующему принципу: при приближении объекта на расстояние менее 4 сантиметров - загорается красный светодиод, иначе горит зеленый.
Достаточно простой пример, в котором мы проверим точность измерения расстояния дальномером hc-sr04. Основа проверки точности станет простая линейка 🙂
3. Инструменты
Чтобы лишний раз не бегать в магазин прямо посреди процесса сборки системы, лучше заранее подготовить все инструменты, что могут вам пригодиться. Так, стоит побеспокоиться, чтобы под рукой были:
- Паяльник. Хорошим выбором станут приборы с регулируемой мощностью, их можно приспособить к любой ситуации.
- Проводники. Естественно, датчик необходимо будет подсоединять к МК, и для этого не всегда подходят стандартные пины.
- Переходник под usb-порт. Если на вашем микроконтроллере нет встроенного порта, побеспокойтесь о том, чтобы его можно было подключить к ПК другим способом. Ведь вам необходимо будет подгружать дополнительные библиотеки и новую прошивку в ваш проект.
- Припой, канифоль и прочие мелочи, в том числе изолированное рабочее пространство.
- Сам чип и МК, а также, при необходимости, корпус будущего устройства. Наиболее опытные инженеры предпочитают распечатывать оболочку для своих проектов на 3Д принтере, однако, если вы живёте в крупном городе, не обязательно тратиться. Можете поискать компании, дающие в аренду принтеры.
Стоит понимать, что дальномер Arduino относится к приборам бесконтактного типа и способен обеспечивать точные измерения. Но всё же не стоит забывать, что профессиональные устройства используют совершенно другие технологии и проходят длительную калибровку под все материалы, а соответственно, в любом случае, окажутся лучше. Также у нашего проекта будет ограниченный диапазон измерения расстояний, от 0.03 до 4 метров, что подойдёт не во всех случаях.
Но, что хорошо, на работу устройства не оказывается никакого влияния со стороны ЭМ излучений и солнечной энергии. А в комплекте к датчику уже находятся нужные ресиверы и трансмиттеры, которые пригодятся, когда вы будете собирать ультразвуковой дальномер Ардуино.
Важно! В нашем уроке можно будет ничего не паять, т.к. мы будем использовать макетную плату и провода-перемычки. Но если вы захотите в итоге собрать законченное устройство - вам пригодится всё что мы указали выше.
4. Комплектующие
Так как мы решили пока ничего не паять - оптимальный набор деталей будет следующим:
- 1 - Arduino UNO R3 (или аналог)
- 1 - Ультразвуковой датчик расстояния HC-SR04
- 1 - красный светодиод
- 1 - зеленый светодиод
- 2 - резистор 560 Ом
- 1- макетная плата
- 8 - проводов-перемычек (папа-папа)
- 1 - линейка для измерения расстояния
5. Подключение датчика HC SR04
С подключением датчика не должно возникнуть никаких проблем. Достаточно с помощью проводников соединить пин на питание с источником или МК, а ввод и вывод, соответственно, присоединить непосредственно к МК. Воспользуйтесь схемой ниже для сборки схемы:

У самого сенсора SR04 следующие характеристики от которых вам стоит отталкиваться:
- Напряжение для питания – 5В.
- Работает в цепях с силой тока 15 мА.
- Если датчик не используется, то для поддержания его в пассивном состоянии всё ещё требуется до 2 мА.
- Угол обзора у модуля небольшой, всего 15 градусов.
- Разрешение сенсора – 3 десятых см.
- А вот угол для измерений составляет уже приятные 30 градусов.
Также на датчике имеются четыре вывода по стандарту 2.54 мм. В них входит контакт для питания с положительным напряжением +5В, пины для ввода и вывода сигнала и заземление.
В конечном варианте выглядеть устройство должно примерно таким образом:

6. Код
Код для нашего устройства ниже. Помните, что красный светодиод должен загораться при расстоянии менее 4 см.
/* Arduino HC-SR04 ультразвуковой датчик расстояния VCC подключается к 5v, GND к GND Echo к 13 пину на Arduino, Trig к 12 пину на Arduino Позитивная нога красного светодиода к 11 пину на Arduino Позитивная нога зеленого светодиода к 10 пину на Arduino */ #define trigPin 13 #define echoPin 12 #define led 11 #define led2 10 void setup() { Serial.begin (9600); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(led, OUTPUT); pinMode(led2, OUTPUT); } void loop() { long duration, distance; digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = (duration/2) / 29.1; if (distance < 4) { // На этом этапе происходит вкл/выкл светодиода digitalWrite(led,HIGH); // когда загорается красный, зеленый обязан выключится digitalWrite(led2,LOW); } else { digitalWrite(led,LOW); digitalWrite(led2,HIGH); } if (distance >= 200 || distance <= 0){ Serial.println("Out of range"); // Вне диапазона } else { Serial.print(distance); Serial.println(" cm"); // тут тоже можно указать " см" } delay(500); }
Единственное, о чем стоит помнить, – далеко не все функции и библиотеки написаны профессионалами. Многие из них создаются такими новичками, как и вы, соответственно, старайтесь просматривать код, прежде чем заключать, что датчик не работает или выдаёт неправильные данные.
Но значительно лучше будет изучить основы программирования и С++, чтобы в дальнейшем самостоятельно писать многие вещи самому.
7. Запуск и настройка
При первом запуске устройства происходит следующее:
- Подается импульс на вход Trig.
- В самом датчике сигнал преобразуется в 8 импульсов, у которых частота достигает 40 кГц, их он, соответственно, и посылает вперёд.
- Доходя до препятствия, импульсы отражаются и возвращаются на приемник, происходят моментальные расчеты в МК, и вся информация подаётся на устройство вывода. В нашем случае – это консоль ПК, но в будущем мы сделаем урок, где данные будут выводиться на LED-экранчик.
При первом запуске мы используем линейку, которая позволит сравнить точность измерений. Запустив устройство, проверьте данные, которые будут выведены в консоли.
Датчик пользуется большой популярностью и всё больше людей пишут свои решения для работы с ним.
Новые статьи
- Желе из варенья – десерт на скорую руку
- Молитва — разговор с Богом Какие молитвы нужно знать в церкви
- Порядок заполнения расчета по страховым взносам Порядок заполнения расчета по страховым взносам
- Тарталетки: рецепты теста и формы для тарталеток
- Защититься от магии вуду
- Марк лициний красс (115–53 до н э
- Если у вас порчей забирают здоровье Как забрать здоровье у человека
- Нарисовать иллюстрацию к рассказу сказание о кише
- Пшённая каша с тыквой Продукты для приготовления
- Маринованные огурцы с морковью по-корейски
Популярные статьи
- К чему снится песок во сне
- Страны с крупнейшей экономикой мира Самые мощные экономики мира
- Численность населения польши, его состав
- Что значит «акцептован счет»?
- Ученые узнали, что было до сотворения мира (интересные факты)
- Тайны Фаэтона: Пятая планета погибла из-за ядерной войны?
- Важнейшие астрономические события уходящего года от астронома сергея попова
- Псковская православная миссия в годы великой отечественной войны
- Бсп дополнения. Бессоюзные предложения. Схема разбора сложного бессоюзного предложения
- Примеры использования вводных и вставных конструкций